① FA用机器人的种类和用途
③ 手部功能例
手部功能的例子
前一章节举例说明了机器人的种类和内部结构的概要。
在使用机器人的时候,非常重要的一个因素就是“手部”部分。在制造、组装、搬运、检查等各种各样的场合下都会使用机器人,必须根据各自的工作选择最佳手部。
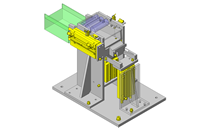
这里,继续前一章节的例子(晶圆搬运机器人),介绍保持工件(单晶硅圆片)的手部(末端执行器)例子。
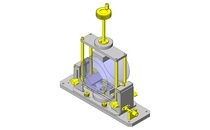
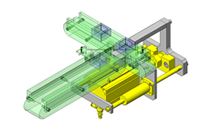
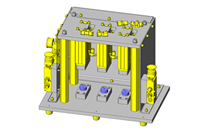
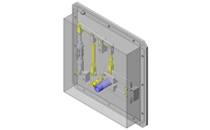
例5) 边缘握持式末端执行器
")
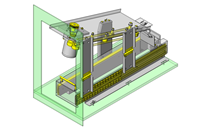
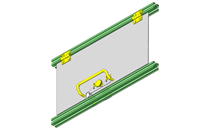
如上图所示,一共在末端执行器上设置了4处零件来限制晶片发生错位,通过内置的气缸来按紧晶片从而固定好。
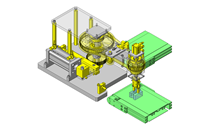
这种搭载了边缘握持式手部的机器人,主要多用于将载入埠上的盒内晶片传递给装置内部的过程侧的EFEM(Equipment of Front End Module)内。
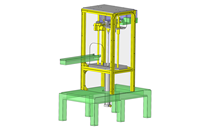
这是使用正压空气保持工件的方法的一例。另外,还有如使用真空吸附(-80kPa左右)的保持方法、落入方式(捞起)、伯努利真空方式等,应根据用途区分使用这几个主要方式。